Self-Driving with Small Cars
Our goal is to develop a software stack for the cars to autonomously drive in the traffic. For this purpose, we start with the small cars that are cheaper, safer and easier to test and deploy self-driving technologies. We have built our own small car, called the Bear Car, which is approximately 1/10th of the full-size vehicles, integrating the same self-driving technologies, such as, LiDAR, 3D camera, IMU, encoders, ECU, etc.

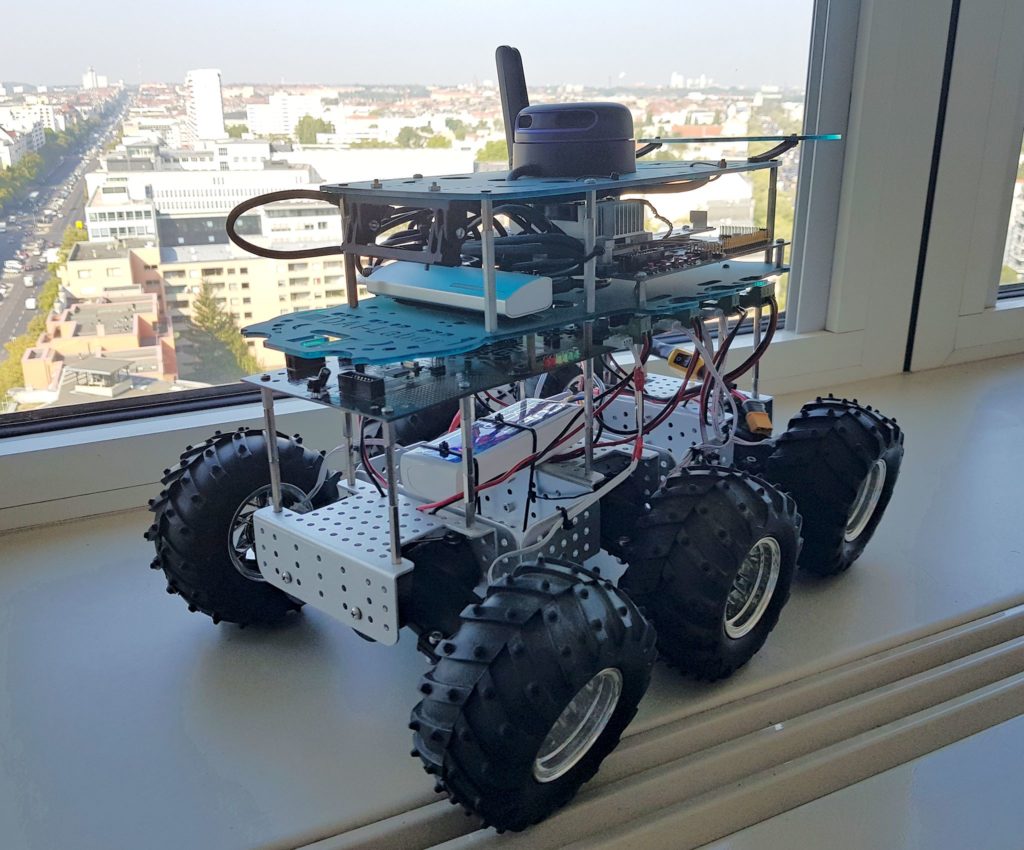
The Bear Car comes with two options for different use-cases, i.e., 4 wheeled (a speedster) and 6-wheeled (thumper), both powered by the Nvidia Jetson GPUs. We are developing technologies like SLAM (Simultaneous localization and mapping), object recognition (e.g., lane detection, obstacle detection, traffic sign recognition), global planning (i.e., obstacle-free, drivable and safe path planning), local planning (i.e., navigation planning) and driving control using Cross-Track-Error. Thanks to this platform and our SW stack we are using the cars in our teaching activities, allowing the students to experience autonomous driving solutions, facing several challenges like parking, racing on a track, maneuvering, lane following, etc.

We are continuously improving the localization, planning and control solutions and make them run more stable on the Bear Car with our students. Our intention is to launch our Bear Car and its SW stack as an open-source platform for autonomous vehicle researchers worldwide. In addition, our ultimate goal is to migrate rigorously tested self-driving technologies on the small cars to our real autonomous car.

Through a continuous integration process, our ultimate goal is to migrate rigorously tested self-driving technologies on the small cars to our real-size autonomous car.