Autonomes Fahren mit kleinen Autos

Unser Ziel ist es, einen Software-Stack zu entwickeln, mit dem die Autos autonom im Verkehr fahren können. Zu diesem Zweck beginnen wir mit den kleinen Autos, die billiger, sicherer und einfacher zu testen sind und Technologien für das selbstständige Fahren einsetzen. Wir haben unsere eigenen kleinen Autos gebaut, die so genannten Bären, im Maßstab 1:10 und der gleichen Selbstfahrtechnologie versehen, wie z.B. LiDAR, 3D-Kamera, IMU, Encoder, ECU (Steuergerät) usw.
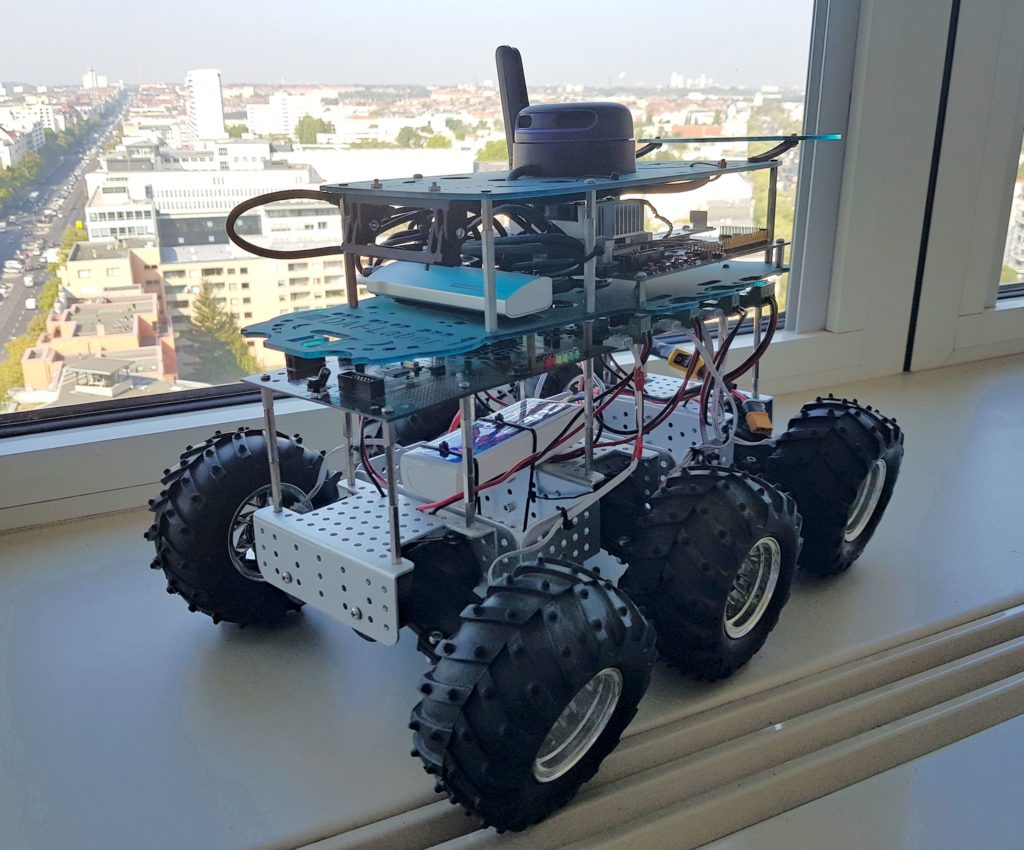
Die Bären wurden zwei Varianten für verschiedene Einsatzfälle aufgebaut, d.h. mit 4 Rädern (ein Racing car) und 6 Rädern (Thumper), die beide von den Nvidia Jetson-GPUs gesteuert werden. Wir entwickeln Technologien wie SLAM (gleichzeitige Lokalisierung und Kartografie), Objekterkennung (z.B. Fahrspurerkennung, Hinderniserkennung, Verkehrszeichenerkennung), globale Planung (d.h. hindernisfreie, fahrbare und sichere Wegplanung), lokale Planung (d.h. Navigationsplanung) und Fahrsteuerung mit Cross-Track-Error. Dank dieser Plattform und unseres SW-Stacks setzen wir die Autos in unserer Lehrtätigkeit ein und ermöglichen den Studierenden, autonome Fahrlösungen zu erleben. Sie entwickeln ihre eigenen Anwendungen, wie z.B. Parken, Rennen auf der Strecke, Manövrieren, Spurverfolgung usw.

Wir verbessern ständig die Lokalisierungs-, Planungs- und Kontrolllösungen und sorgen dafür, dass sie auf den Bären mit unseren Studierenden stabiler laufen. Unsere Absicht ist es, unsere Bären und ihre SW-Stacks als Open-Source-Plattform für autonome Fahrzeugforscher weltweit zur Verfügung zu stellen.

Durch einen kontinuierlichen Integrationsprozess ist es unser Ziel, die rigoros getesteten Selbstfahrtechnologien der Miniautos auf unser autonomes Auto in Originalgröße zu übertragen.