Autonomous Driving Playground
Motivation
Die Mobilität der Zukunft wird durch das intelligente Zusammenspiel unterschiedlicher autonomer Verkehrsmittel bzw. Modalitäten bestimmt. Während die Innovationskraft zum Erreichen einer echten autonomen Mobilität in der Industrie weiter zunimmt, ist die Verfügbarkeit von Pilotstandorten, an denen fortgeschrittene Autonomiestufen eingehend getestet werden können, ein entscheidender Eckpfeiler für die Erreichung einwandfreier autonomer Fahrzeuge und der zugehörigen Dienste. Mit dem Autonomous Driving Playground Testbed (ADP) bietet das DAI-Labor eine Umgebung und Plattform, um neue Fähigkeiten und Lösungen zu entwickeln sowie zukünftige multimodale Mobilitätskonzepte zu validieren und zu demonstrieren, bei denen autonomes Fahren und die für die Realisierung vorhergesehenen Daten- und Dienstleistungs-Ökosysteme zum Einsatz kommen.
Zielsetzung
Ziel des Autonomous Driving Playgrounds ist die Bereitstellung der Daten, Plattform, Werkzeuge und Infrastruktur für
- das Testen von KI-Algorithmen, Fahr- und Vernetzungsfunktionen einzelner Modalitäten im Realbetrieb,
- das Testen von verschiedenen Modalitäten in ihrer Kombination miteinander sowie
- die Bereitstellung von historischen und Echtzeit-Mobilitätsdaten und Metriken für Hersteller, Zulieferer, Entwickler und Betreiber der Mobilitätslösungen.
Das ADP Testbed konzentriert sich auf die Erprobung innovativer autonomer Fahrlösungen in einer realistischen Umgebung, die ein reichhaltiges, dichtes und urbanes Umfeld bietet, in dem jede Forschung, die fortgeschrittene Autonomiestufen umfasst, ihre Herausforderungen findet. Dazu gehören die physische Teststrecke, umfangreiche Daten, die in Fahrzeugen und am Straßenrand von einer Vielzahl an Sensoren erfasst wurden, die V2X-Kommunikation, maschinelles Lernen unter Ausnutzung der Datenverarbeitungsinfrastruktur in der Cloud und entlang der Straße, intelligente lokale dynamische Kartenzusammenstellung und vieles mehr.
Herausforderungen
Das Zusammenspiel von Sensoren, IoT-Middleware, Cloud-Plattformen und KI-Verfahren sowie die Verschmelzung verteilter Sensordaten, die Interoperabilität zwischen Fahrzeug- und Infrastrukturanbietern sowie eine flexible Kommunikationsinfrastruktur sind einige Beispiele für Herausforderungen, die mit dem Testfeld für autonomen Fahren verbunden sind. Das ADP Testbed soll die Erforschung des autonomen Fahrens erleichtern, indem es sowohl eine Umgebung für das Ausprobieren innovativer Lösungen schafft als auch eine Plattform zum Testen ausgereifter Lösungen für die Industrie bereitstellt.

Teststrecke
Das ADP Testbed befindet sich auf der Straße des 17. Juni zwischen Ernst-Reuter-Platz und Brandenburger Tor. Es handelt sich dabei um eine knapp vier Kilometer lange, vielbefahrene Bundesstraße im Herzen Berlins mit folgenden Charakteristiken:
- Dreispurig in beide Fahrtrichtungen mit Mittelstreifen
- Zwei große Kreisverkehre mit jeweils fünf Ein- und Ausfahrten
- 15 Lichtsignalanlagen
- Mehr als 1.500 Parkplätze (parallel und schräg zur Fahrbahn, am Fahrbahnrand und auf dem Mittelstreifen sowie in separaten Parkbereichen)
- Fahrradwege neben der Straße
- Kreuzende Rad- und Fußwege
- Sowohl bewaldete als auch bebaute Abschnitte
- Brücken
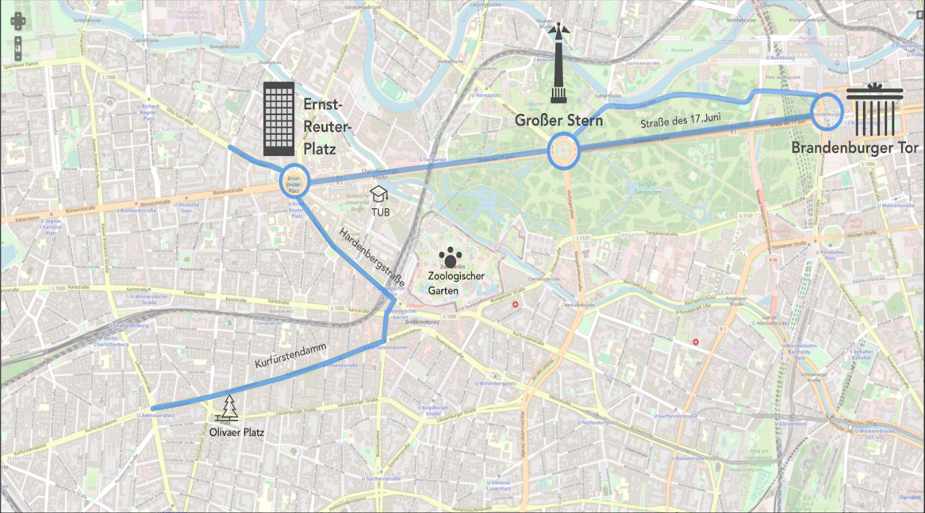
Eine Erweiterung des Testfeldes um die John-Foster-Dulles-Allee, Otto-Suhr-Allee, Hardenbergstraße und Kurfürstendamm ist bereits geplant, um sowohl die parlamentarische Gesellschaft als auch eine bedeutende Einkaufsmeile mit einzubinden.
Technologie
Das ADP Testbed besteht aus folgenden Komponenten, die ständig weiterentwickelt werden:
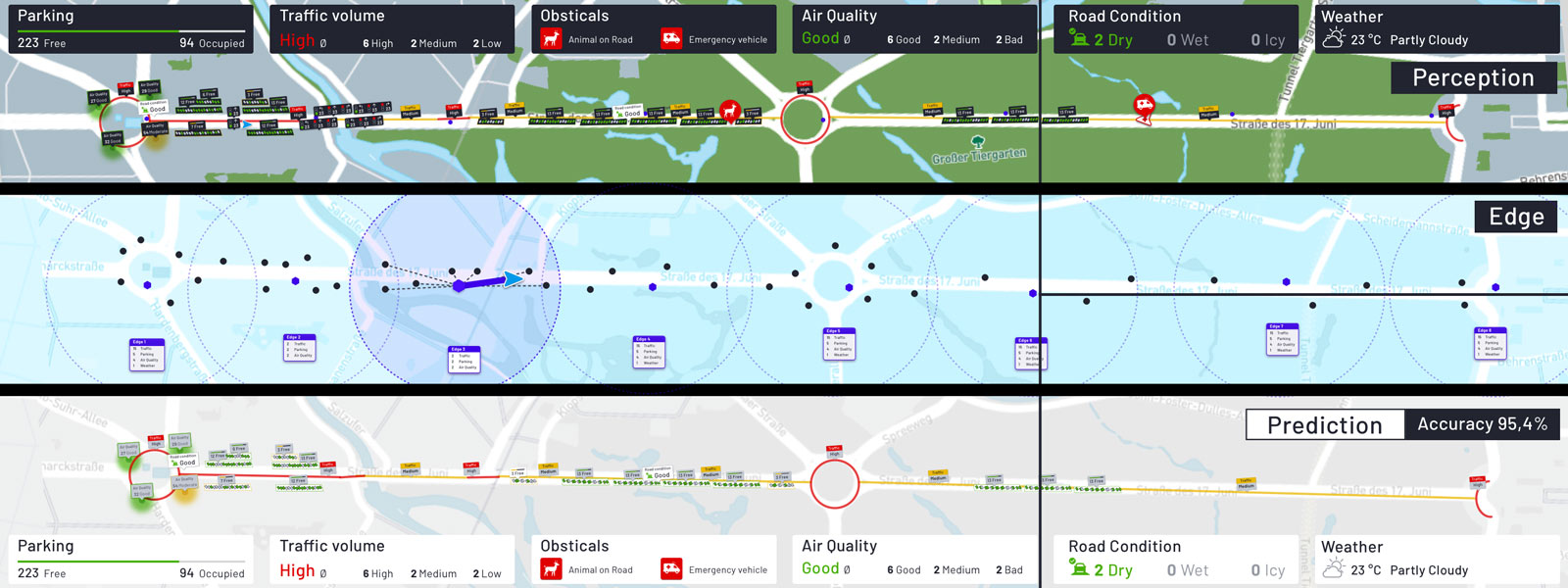
- Straßenseitige Sensorik beispielsweise zur Erfassung freier Parkplätze, von Verkehrsteilnehmern, des Fahrbahnzustands, der Luftqualität und der Wetterverhältnisse
- Edge-Computing-Infrastruktur zur lokalen Verarbeitung und Analyse der Daten, Erstellung von Vorhersagen sowie lokalen Entscheidungsfindung mit geringer Latenz
- Cloud-Infrastruktur für die globale Sammlung und Analyse aller Daten, die globale Entscheidungsfindung und den Betrieb der Leitstelle
- Verfahren des Maschinellen Lernens zur Erkennung, Klassifizierung und Verfolgung von Objekten (LKW, PKW, Fahrrad, Fußgänger) auf Basis von Verkehrsüberwachungskameras
- Data-Analytics-Engine zur Analyse der Sensordaten und Vorhersage zukünftiger Situationen, um die richtigen Entscheidungen möglichst frühzeitig treffen zu können
- V2X-Infrastruktur sowohl zur Warnung vor Gefahrensituationen als auch zur Übermittlung aktueller und zukünftiger Ampelphasen, aggregierter Sensordaten, Fahrzeugdaten und Vorhersagen
- IP-basierte Kommunikationsinfrastruktur auf Basis von WLAN, Mikrowelle und 4G/5G für die Synchronisation zwischen der Cloud und den Edge-PCs bzw. Fahrzeugen
- Test-Fahrzeug für die Erprobung neuer Funktionen bzw. verschiedener Anwendungsfälle in realer Umgebung

Versuchsträger
Als Versuchsträger steht momentan ein VW Tiguan als vernetztes Fahrzeug zur Verfügung, das demnächst um automatisierte Fahrfunktionen ergänzt wird.



Weitere Versuchsträger wie ein automatisierter Erklärbus von 12 Meter Länge, ein automatisierter Transporter und ein Lieferroboter sind bereits geplant.
Angebot
Mit dem ADP bieten wir interessierten Unternehmen und Institutionen folgende Leistungen an (Auszug):
- Erprobung neuer automatisierter, vernetzter und kooperativer Fahrfunktionen
- Beispielanwendungen und Standardtestfälle stehen zur Verfügung
- Umsetzung weiterer Digitalisierungsideen, Testfälle oder Anwendungen
Im Folgenden sind einige Nutzungsbeispiele aufgezählt:
- Integration von Infrastruktur und Fahrzeug-Perception CPM, IVIM
- Infrastrukturkomponenten (Sensorik, Kommunikation, Auswertung) und Anwendungen
- Car-2-Car und Car-2-X Kommunikation auf Basis vom ITS G5 Standard oder Custom
- Gemeinsame Fahrmanöver, Konvoi (CAM, Platooning)
- Gefahrenstellen (DENM)
- Ampelinformationen SPaT / MAP – GLOSA
- Parken, Straßenzustand, Wetter, Verkehrssituation, Luftqualität – aktueller Zustand und Vorhersagen
- Leitstand und Verkehrsinformationen für Stadtverwaltung oder Verkehrslenkung
- Skalierung und Verteilung der Lösung auf Edge, Cloud und Fahrzeug
- Bereitstellung von Echtzeitdaten und Prognosen
- Datennutzung für Auswertungen aller Art
- Definition von Metriken zur Evaluierung
Mögliche Szenarien
Einfache Szenarien (EIN Auto, Ego Car):
- Geschwindigkeit: Höchstgeschwindigkeit (50 km/h), angepasste Geschwindigkeit (Wetter, Geschwindigkeitsempfehlung, GLOSA, Verkehrsaufkommen)
- Abstand: Vordermann, Seitenabstand (fahrende und parkende Fahrzeuge, Radfahrer, Personen)
- Spurhalten, Spurwechsel, Überholen (nicht-kooperativ, im Mischverkehr)
- Einparken, Ausparken (nicht-kooperativ, im Mischverkehr)
- Kreisverkehr
- Toter Winkel
- Notfahrmanöver: Notbremsfunktion, Ausweichen
Vernetzte Szenarien (Standards): Vehicle2Vehicle, Vehicle2Infrastructure, Infrastructure2Vehicle:
- CAM: Position, Richtung, Geschwindigkeit
- DENM: Gefahrenmeldungen, Baustelle, Dynamisch: Fußgänger, Fahrradfahrer, Notbremsung
- SPaT / MAP: Ampelphasen, Kreuzungstopologie
- GLOSA: Grüne-Welle-Assistent, Geschwindigkeitsreduzierung
Vernetzte Szenarien ((noch-)nicht-Standard): Kooperative Perzeption:
- CPM / IVIM: Collective Perception Message (größere Latenz als bei CAM), Infrastructure to Vehicle Information Message (z.B. variable Geschwindigkeitsbegrenzung, Baustellen)
- Weitere Nachrichten von Edge / Cloud für Perzeption und Vorhersagen: Wetter, Luftqualität, Verkehrssituation, Objekterkennung (Fahrzeuge, Fahrräder, Fußgänger)
Kooperative Fahrsituationen:
- Konvoi / Platooning auf Basis von V2V-Kommunikation
- Stop & Go
- Kooperatives Ein- und Ausparken
- Kooperativer Spurwechsel (auch Ausweichen bei Baustellen, Spur blockiert)
- (Einfädeln und Abfahren)
- Abbiegen
Schlechtwetter:
- (sehr) rutschige Oberfläche
- Starkregen, Schnee, Nebel
Rückfall-Szenarien:
- Übernahme der Fahraufgabe durch Fahrer
- Risiko-minimierende Manöver (Fahrer reagiert nicht)
Fernunterstützung bzw. -steuerung – unterschiedliche Ebenen:
- High-level Kommandos
- Assistierende Ebene
- Direkte Steuerung